

Research Summary
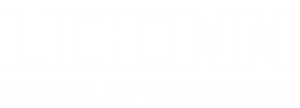
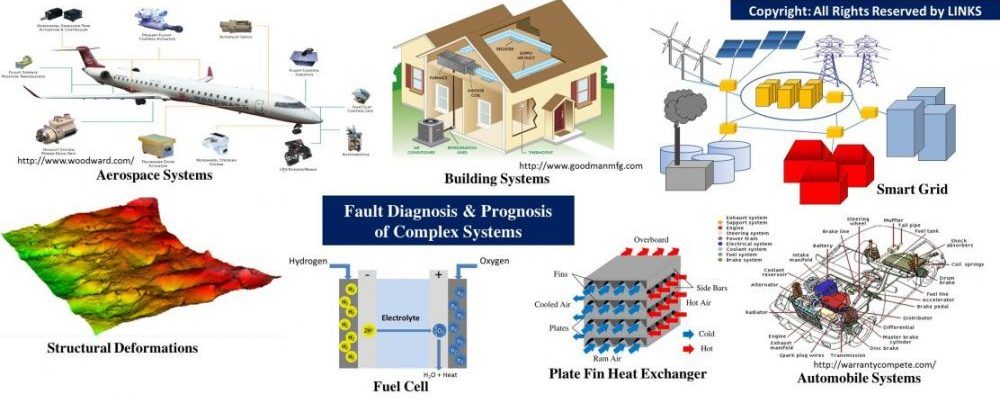
LINKS focuses on fundamental problems related to small and large-scale autonomy including Adaptive Motion Planning, Task Planning, Adaptive Coverage Planning, Collaborative Robotics, Multi-robot Teams, Human-robot Interaction, Distributed Intelligence, AI, Data Analytics, Data Reduction, Deep Learning, Information Fusion, Diagnostics & Prognostics, Sensor Selection, and Resilient Control.
Applications: Adaptive Robotics, Autonomous Vehicles, Smart Sensor Networks, Smart Manufacturing, Smart Buildings, Smart Grids, Smart Systems, Smart Cities, Smart Infrastructures, Smart Energy Systems, Smart Aerospace Systems, and other Cyber-physical Systems.
Contact
Shalabh Gupta
ITE Building Room #341
371 Fairfield Way, Storrs, CT, 06269
Ph: (860) 486 3494
Email: shalabh.gupta@uconn.edu
Selected Recent Publications
"C*: A Coverage Path Planning Algorithm for Unknown Environments using Rapidly Covering Graphs", IEEE Transactions on Robotics, 2025.
"Generalized Multi-Speed Dubins Motion Model", IEEE Transactions on Robotics, 2025.
"SMART: Self-Morphing Adaptive Replanning Tree", IEEE Robotics and Automation Letters, 2023.
"ε*: An Online Coverage Path Planning Algorithm", IEEE Transactions on Robotics, 2018.
"T*: Time-Optimal Risk-Aware Motion Planning for Curvature Constrained Vehicles", IEEE Robotics and Automation Letters, 2019.
"CT-CPP: Coverage Path Planning for 3D Terrain Reconstruction using Dynamic Coverage Trees", IEEE Robotics and Automation Letters, 2022.
"CARE: Cooperative Autonomy for Resilience and Efficiency of Robotic Teams for Complete Coverage of Unknown Environments under Robot Failures", Autonomous Robots, 2020.
"DARE: Diver Action Recognition Encoder for Underwater Human-Robot Interaction", IEEE Access, 2023.
"Rapid Path-planning for Dubins Vehicles under Environmental Currents", Robotics and Autonomous Systems, 2020.
“POSE.R: Prediction-based Opportunistic Sensing for Resilient and Efficient Sensor Networks”, ACM Transactions on Sensor Networks, 2020.
“POSE.3C: Prediction-based Opportunistic Sensing using Distributed Classification, Clustering and Control in Heterogeneous Sensor Networks”, IEEE Transactions on Control of Network Systems, 2019.
“POSE: Prediction-based Opportunistic Sensing for Energy-efficiency of Sensor Networks using Distributed Supervisors”, IEEE Transactions on Cybernetics, 2018.
“Topological Characterization and Early Detection of Bifurcations and Chaos in Complex Systems”, Chaos: An International Journal of Nonlinear Science, 2017.
“Optimal Sensor Selection and Fusion for Heat Exchanger Fouling Diagnosis in Aerospace Systems”, IEEE Sensors Journal, 2016.
Highlights
Robotics Club
Home Department
School of Engineering