Robotics Club
Organizing Committee
|
President James Yee
Web Support Junnan Song
|
Finance Manager Andrew Lawson
|

Associate Members
| Prof. Shengli Zhou (ECE) Prof. Ali Bazzi (ECE) Prof. Ashwin Dani (ECE) Prof. Omer Khan (ECE) Mr. Peter Van Buren (East Long Meadow High School) |
Contact
| Interested in joining us?
Please send an email to Prof. Shalabh Gupta at shalabh.gupta@uconn.edu with a brief introduction of yourself! |
Summer Activities
|
|
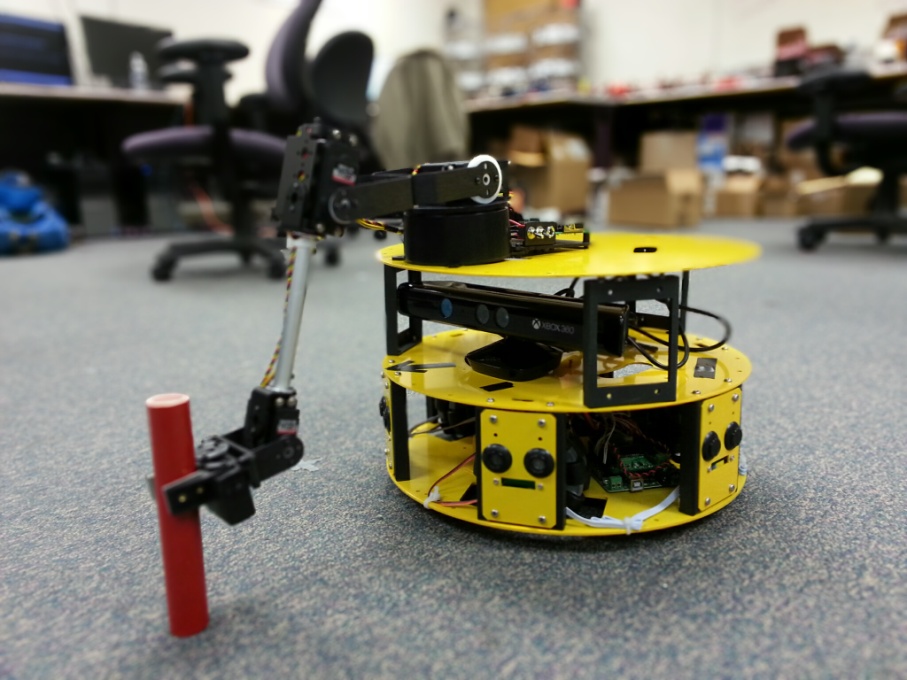
Multitasking Cooperative Robots The objective of this project is to design intelligent algorithms for constructing cooperative multitasking robot teams. Specifically, the goal is to build a team of unmanned vehicles where a part of team would serve as the search team while the other part would serve as the rescue team. It is envisioned that these two teams cooperate and collaborate with each other to obtain successful accomplishment of a search and rescue mission. Here a current challenge is to design a “lifter robot” that will use localization and mapping data to go to a specified location, lift, and retrieve an object. This requires smart 3d sensing technologies and mapping algorithms. Additionally the way sensor data is being processed and utilized by the robot is another area of research. There are many applications for this, such as to send autonomous robots into situations normally dangerous for humans. |
|
|
Decentralized Control of Multiple UAVs for Autonomous 3-D Map Generation The objective of this project is to build a fleet of autonomous quad copters that will have the ability to both fly independently and map cooperatively an unknown environment without any human interaction or assistance from global positioning systems. By accomplishing this goal, a group of aerial robots would be able to engage in potentially many team-based tasks, like search and rescue missions, efficient exploration of buildings, or lifting large objects, etc. The current challenges include coordination between multiple quad copters, joint maneuvering, feasible vision using a small onboard computer, stable flight, autonomous obstacle avoidance, 3d map generation, safe landing, etc. |
|
|
Underwater Exploration using Autonomous Underwater Vehicles The objective of this project is to make these AUVs intelligent, that is, to facilitate autonomous underwater exploration. The goal is that they will be able to explore aquatic environments without causing harm to themselves, and more importantly without causing harm to the surrounding ecosystem. This project has currently two main challenges:
|
|
|
Robotic Wrist Rehabilitation Device The robotic wrist rehabilitation device is designed to help patients with flexion/extension and abduction/adduction of the wrist. To achieve this, pneumatic artificial muscles are used to mimic the actual muscles that are used normally to move the wrist. To make this a practical rehabilitation device for the user, it must be made as lightweight and as comfortable as possible. The design involves three main factors: hardware implementation, control design and signal processing. Although there are some challenges within each aspect, the most crucial is hardware implementation. Finding the most suitable hardware material will increase in the sensor’s precision and control stability, enhance the user’s comfort, and increase the overall reliability of the rehabilitation device. |
|
|
Autonomous Landing Quadcopter The main objective of this project is to develop a system that allows a quadcopter to autonomously scout out a scene for potential level landing areas, tag their locations and after closer examination land in the first truly obstacle free area it comes to. Challenging aspects of the project include defining a mathematical description of what it is to be level, creating a routine that allows the quadcopter to revert to landing areas it saw previously if the one it chooses is obstructed, and stabilizing the quadcopter so it doesn’t drift in autonomous mode. The ability to autonomously land in an unknown environment will allow a drone to be used for delivering supplies into (or scouting out ) disaster zones, obtaining samples in areas unreachable by humans and many other applications, and for recharging. |